空撮ドローンを製作しよう – ジンバルカメラの製作(6)
今回は、前回製作したジンバルカメラへのファームウェアのインストールおよびパラメータの設定方法について説明します。
ファームウェアのインストール
インストールするファームウェアおよびインストールするためのPCツールは以下のgithubのサイトからzipファイルをダウンロードするか、git clone でダウンロードします。
ダウンロードしたstorm32bcg-master.zipにはStoRM32BCGプロジェクトのバージョンのファームウェア、回路図・PCBレイアウト図、アプリケーションインタフェース等が含まれています。この中で「firmware binaries & gui」フォルダーにあるo323bgc-release-v096-v20160319.zipファイルを解凍します。解凍したフォルダーにファームウェアのインストールおよびパラメータ設定を行うツール(o323BGCTool_v096.exe)と「o323BgcFirmwareFiles」フォルダーにボードごとのファームウェアが生成されます。ツールを用いてStorm32BCG v1.xx(IMUのI2C接続)用のファームウェアをインストールします。以下にインストール手順を示します。
ファームウェアにインストールには、MPU(STM32F103RC)に搭載されている①ブートローダを用いる方法と、②ST-Linkという専用のアダプターを用いる方法があります。ここでは、ST-Linkが無くてもインストールができる①について説明します。
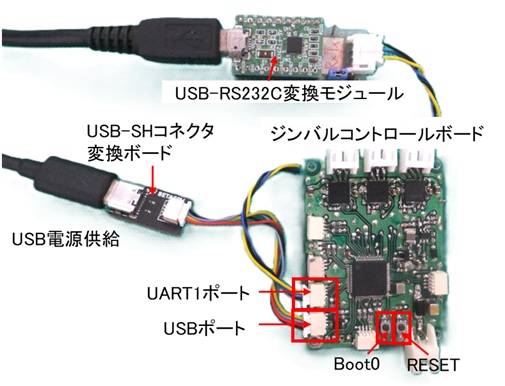
①では、ジンバルコントロールボードのUART1端子(TX,RX,GND)とPCに接続したUSB-RS232C変換モジュールのUART端子(RX,TX,GND)をクロス接続(Tx-Rx、Rx-Tx)します。そしてUSBポートを通して5V電源を供給します。
ファームウェアのインストールは以下の手順で行います。
- ジンバルコントロールボード上のBoot0スイッチとRESETスイッチを同時にONし、その後RESETスイッチをOFF、次にBoot0スイッチをOFFにする。これによりジンバルコントロールはブートモードに移行する。
- o323BGCTool_0.96を起動し、Tool画面右上の「Flash Firmware」①タブをクリックし、ファームウェアインストール画面を表示する。
- 「STorM32 BCG Board」②欄で「StoM32 v1.3x」(default)を選択する。
- 「Firmware version」③欄で「v0.96」(default)を選択する。
- 「Selected Firmware Hex File]④欄に「o323BgcFirmwareFiles\o323bgc_v096_storm32bgc_v130_f103rc.hex」(default)を設定する。
- 「Stem32 Programmer」⑤欄で「System Bootloader @ UART1」(default)を選択する。
- 「COM port」⑥欄をクリックし、UART1が接続されたポートを選択する。
- 「Flush Firmware」ボタン⑦をクリックし、ファームウェアのインストールを開始する。
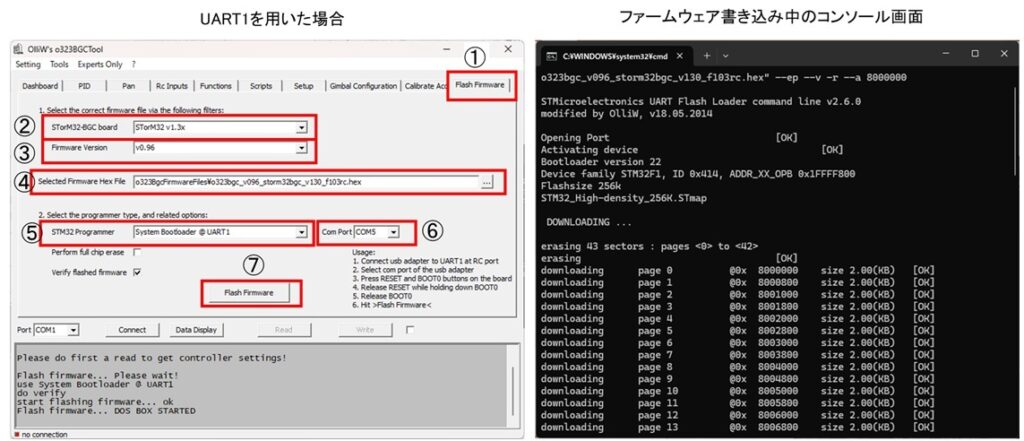
インストールが開始されると、コンソール画面が表示され、ポートのチェック、デバイスのチェック、Flushメモリデータの消去、ファームウェアの書き込み、書き込んだファームウェアの照合が行われます。照合後に「RUNING…」、「Your code is running」が表示され、ファームウェアが走り始めたことがわかります。この時、ボード上の緑と赤のLEDが点滅し始めます。
ジンバルカメラの初期設定
ジンバルコントロールボードの初期設定は以下の手順で行います。
- PC上でo323BGCTool_0.96を起動し、「PID」タブをクリックしPIDパラメータ設定画面に移動しPIDパラメータの仮設定を行なう。「Pitch Dumping」、「Roll Dumping」、「Yaw Dumping」パラメータをそれぞれ6に、「Pitch Stability」、「Roll Stability」、「Yaw Stability」を5に設定します。カメラが軽いのでモータ振動の抑制のため各PIDパラメータを小さめに設定する。
- ファームウェアの書き込み済のジンバルコントロールボードにバッテリーを接続して起動する。
- ジンバルコントロールボードとPCをUSBで接続する。
- 「Dashboard」画面に移動し、「port」欄でジンバルコントロールボードが接続されたポート「user000」を選択し、「connect」ボタンをクリックし、「info center」欄に「IMU is present @ LOW ADR」と「VOLTAGE is OK:xx.xx V」が表示されていることを確認する。
- もし、IMUのY軸の方向が進行方向、X軸がY軸に対し右方向90度に配置されていない場合は「ACC Cab」でIMUの調整を行う。本ジンバルカメラのようにピッチ軸とロール軸の回転に制限がある場合は「Run 1.port Calibration」ボタンをクリックする。
- 「o323BCG 1-port ACC Calibration」画面が表示されるので カメラを進行方向正面に向け、Accept Current reading」ボタンをクリックする。読み込んだ値が「Zero」と「Scale」欄に表示されるので、「OK」ボタンをクリックする。
- 「ACC Cab」画面に戻り、「Zero」と「Scale」欄に設定された値が表示される。
- 「Gimbal Configuration」タブをクリックしてコンフィグレーション画面に移動し、「Gimbal Configure Tool」ボタンをクリックする。o323bcg Configure Gimbal Tool画面が表示される。
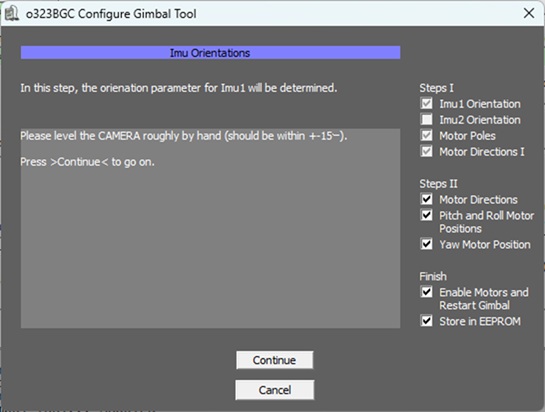
- この画面の右側StepsⅠでジンバルコントロールボードに搭載していない「Imu2 Orientation」チェックを外し、「Continue」ボタンをクリックする。
- 「IMU Orientations」画面に変わり、「Please level the CAMERA roughly by hand (should be within +-15-).」が表示されるので、カメラが前方正面に向くようにカメラ角度を手動で変え、「Continue」ボタンをクリックする。
- 「Please pitch(tilt) both the camera and gimbal down by ca. 45-, without rolling! Hold them in the position until the imu orientation(s) got detected.」が表示されるので、正面を向いているカメラを下方45度にゆっくりと傾ける。45度に達すると自動的に画面が変わり、「Imu orientations found. Imu1 Orientation =no.3:z270- y -x z」が表示されるので、「Continue」ボタンをクリックする。
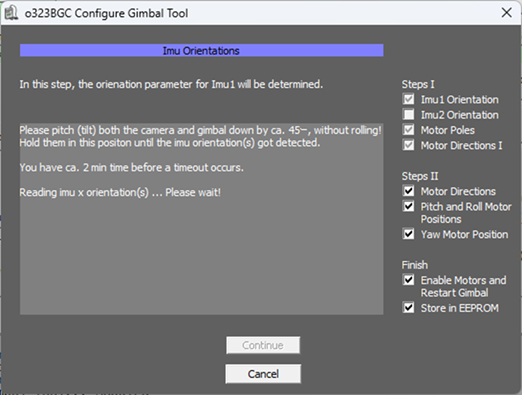
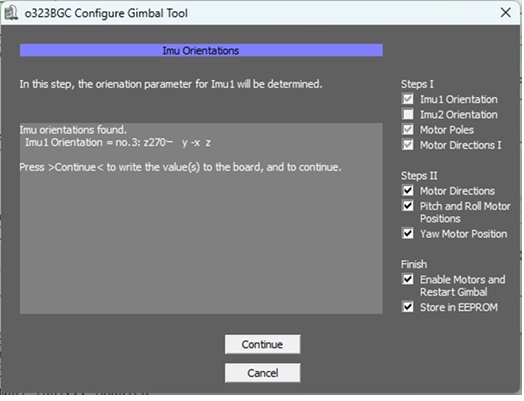
- 続き
- 「Moter Poles」画面が表示されるので、ピッチモータ、ロールモータ、ヨーモータの電極数を選択(今回使用するモータは12極小型ブラシレスモータなので12を選択)し、「Continue」ボタンをクリックする。
- 「Moter DirectionsⅠ」画面が表示されるので、表示内容を確認して「Continue」ボタンをクリックする。
- 「Restart Gimbal」画面が表示されるので、表示内容を確認して「Continue」ボタンをクリックする。
- カメラが初期位置に移動して「STATE is Normal」が表示された後、「Moter DirectionsⅠ」画面が表示されるので、表示内容を確認して「Continue」ボタンをクリックする。
- 「Pitch and Roll Moter Positions」画面が表示されるので、表示内容を確認して「Continue」ボタンをクリックする。
- 「Align Yaw Axis」画面が表示されるので、「<<<」、「<<」、「<」、「0.0-」、「>>>」、「>>」、「>」の各ボタンでヨー軸の角度を正面になるよう調整し、「Continue」ボタンをクリックする。
- 「Finish」画面が表示されるので、表示内容を確認して「OK」ボタンをクリックする。設定したパラメータがジンバルコントロールボードの「EEPROM」に保存され、「Gimbal Configuration」画面に自動的に戻る。
- 「PID」画面に移動しPIDパラメータの設定を行なう。「Pitch Dumping」、「Roll Dumping」、「Yaw Dumping」、「Pitch Stability」、「Roll Stability」、「Yaw Stability」を再調整する。再調整のポイントは、各パラメータのスライダーを振動が発生するまで右に移動させ、振動が発生した時の値の60~80%に戻す。
- 「Setup」タブをクリックして「Setup]画面を表示させ、「RC Pitch Offset」、「RC Roll Offset」、「RC Yaw Offset」の各スライダーを移動させ、ジンバルカメラ起動後のカメラの初期角度を設定する。設定後、「Write」ボタンをクリックすると角度が変わる。
- o323BGCTool画面左上の「Setting」タブをクリックし、表示されたコンボボックスの「Store to EEPROM」をクリックして、初期設定したパラメータをコントロールボードのMPU EEPROMに書き込む。
以上の初期設定が終わりジンバルカメラを再起動すると、USBによるPC接続が無くても、下の動画のように自動的にカメラが初期角度に移動します。
これでジンバルカメラは完成です。カメラ角度はRC送信機により変更することもできます。また、Raspberry-pi Cameraによる動画配信や録画機能に関する設定等は空撮ドローン本体を製作する時に説明します。次回からは空撮ドローン本体の製作について説明します。