空撮ドローンを製作しよう – ジンバルカメラの製作(5)
今回は前回までに作製したジンバルコントロールボードを用いて空撮ドローンに搭載するジンバルカメラの製作を行います。製作のポイントは以下の通りです。
- ジンバル軸はピッチ軸とロール軸の2軸としヨー軸は制御しない(カメラの向きは進行方向のみ)
- ジンバルカメラにはFPV用のカメラと空撮用のカメラの2カメラを搭載する。空撮用のカメラには小型で高解像度の動画配信と録画ができ、さらには物体検知が可能なシングルボードコンピュータ(Raspberry-pi)の専用カメラモジュールを使用する
- ジンバルカメラの重量(シングルボードコンピュータを含む)としては300g以内とする
- フライトコントローラを通してピッチ角度の調整およびカメラ録画のON/OFFを可能とする
ジンバルカメラの構成
上記の設計ポイントを元に検討したジンバルカメラの概略構成を以下の図に示します。
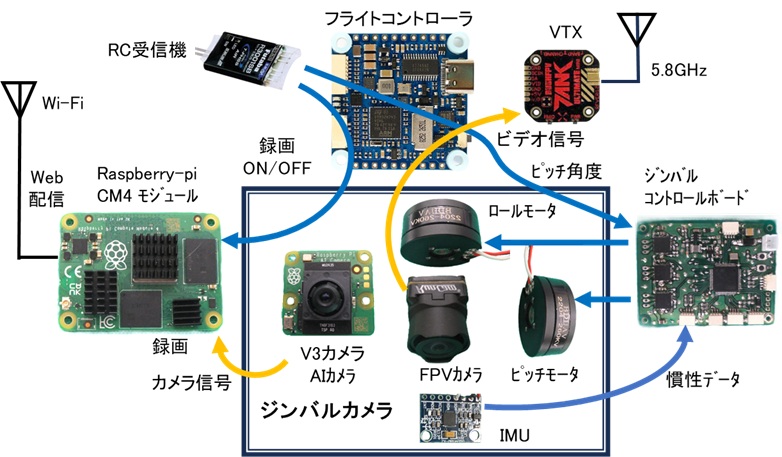
ジンバルカメラ本体にピッチモータ、ロールモータ、FPVカメラ、Raspberry-pi camera (V3カメラまたはAIカメラ)、MP6050 IMUモジュールを搭載します。FPVカメラの信号はフライトコントローラ、VTXにより5.8Ghzのビデオ信号として送信されます。Raspberry-pi cameraとRaspberry-pi CM4モジュールを専用(CSI)フレキシブルケーブルで接続し、カメラ信号あるいはAI処理信号をCM4モジュールに送ります。CM4モジュールのWi-fiにより動画像のWeb配信を行い、同時にCM4モジュール内に静画像、動画像を保存します。V3カメラを用いることで高精細の動画像を撮影すること可能です。またV3カメラの代わりにAIカメラを装着すれば物体検知等がリアルタイムで可能となります。
自作ジンバルコントロールボードのNo1とNo2のモータドライバーによりそれぞれピッチモータとロールモータを制御します。RC受信機のS・BUS信号をフライトコントローラでPWM信号に変換し、ジンバルコントローラボードのRCポートに入力して、RC送信機のボリュームによりピッチ角度を可変できるようにします。また、RC受信機で受信した録画のON/OFF信号をフライトコントローラでGPIO端子のHigh/Low信号に変換し、Raspberry-pi CM4のGPIO端子に入力して、RC送信機のスイッチで録画の開始/停止ができるようにします。以下にジンバルカメラ構成部品のリストを示します。
| 部品 | 品番・機能 | 数量 | 購入先 |
|---|---|---|---|
| FPV camera | Runcam Phenix2 | 1個 | Aliexpress |
| Raspberry-pi camera | V3カメラ SONY IMX708搭載 AIカメラ SONY IMX500搭載 | 1個 | Switch Science 秋月電子 |
| CSI flexible cable for AI camera | 20cm | 1個 | Switch Science 秋月電子 |
| Gimbal motor (pich, roll) | 2204 260kv BLDC motor | 2個 | Amazon Japan |
| IMU Module | MPU6050 I2C module | 1個 | Amazon Japan |
| Raspberry-pi Compute module 4(CM4) | RAM:4GB eMMC:16GB Wi-fi | 1個 | Digikey |
| Small baseboard for CM4 | Waveshare CM4-NANO-B | 1枚 | Aliexpress |
| Voltage Regurater module | 5V2A出力降圧モジュール | 1枚 | Amazon Japan |
| CM4 cooling FAN | 5V FAN for raspberry-pi 4 size:3cm×3cm | 1個 | Amazon Japan |
| Cooling FAN Drive Module | 自作 | 1個 | |
| Antenna cable for CM4 | u-FL RSMA 変換ケーブル | 1本 | モノタロウ |
| Wi-Fi antenna | RSMAコネクタタイプ | 1個 | モノタロウ |
| Gimbal control board | 自作 | 1枚 | 前回参照 |
| カメラホルダー、 ジンバルアーム | 3D プリント自作 | 1セット | |
| CM4 ケース | 3D プリント自作 | 1セット | |
| 防振用ゴムクッション | uxcell 防振 衝撃吸収ダンピング ゴム球 M3.5×13 mm | 4個 | Amazon Japan |
ジンバルカメラの3Dプリントパーツの作製および組み立て
AI camera、FPVカメラ、ピッチジンバルモータ, IMU Moduleはカメラホルダーに、ロールジンバルモータはアームに取り付けます。それぞれを組み合わせてジンバルカメラとしベースボード1に固定します。ジンバルコントロールボードはベースボード2を用いてドローン本体に取り付け、ベースボード1とベースボード2を防振用ゴムクッションを用いて接続します。以下に3Dプリンターで作製した主な部品(カメラホルダー、アームおよびジンバルベースボード)の写真を示します。
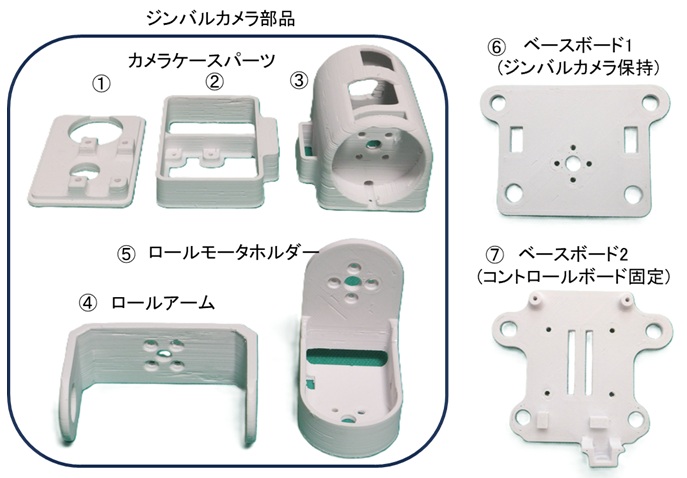
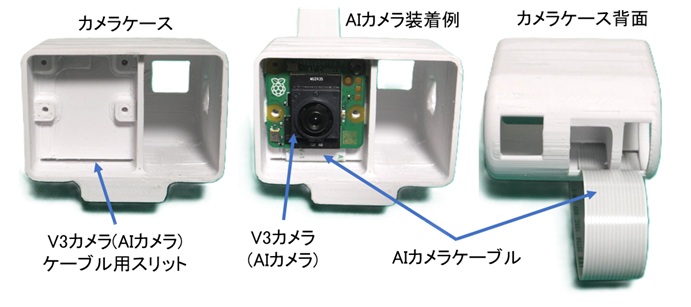
①はカメラケースカバーで、②と③を接着したものが以下に示すカメラケースです。カメラケースには、V3カメラ(AIカメラ)、FPVカメラに加えIMUモジュールおよびピッチモータを組み込みます。カメラケースの下部にはV3カメラ(AIカメラ)のフラットケーブルが通せるようにスリット状の穴を設けて、ケース背面からケーブルを引き出せるようにしています。この穴はできるだけピッチモータにケーブルのテンションが加わらないように配置したものです。
ジンバルカメラの組み立ては次の通りです。
- カメラケースにAIカメラ、FPVカメラ、IMUモジュール、ピッチモーターを取り付け、その後カメラカバーでAIカメラを固定する。この時、カメラケーブルは接続しない(ドローンに取り付ける時にカメラケーブルを接続する)。
- ロールモーターをロールモーターフォルダに取り付け、ロールアームをロールモータに取り付ける
- ロールモーターフォルダとベースボード1をネジで固定する。
- ロールアームとピッチモータを接続する。
- ドローンにベースボード2を取り付け、ベースボードにジンバルコントロールボードを取り付ける。
- ベースボード1とベースボード2をゴムクッションで接続する。
ドローンに接続する前のジンバルカメラを以下に示します。配線引き回し用の3Dプリントパーツも取り付けてあります。コントローラボードを含めたジンバルカメラ全体の重量は約120gです。

Raspberry-pi CM4モジュールケースの作製
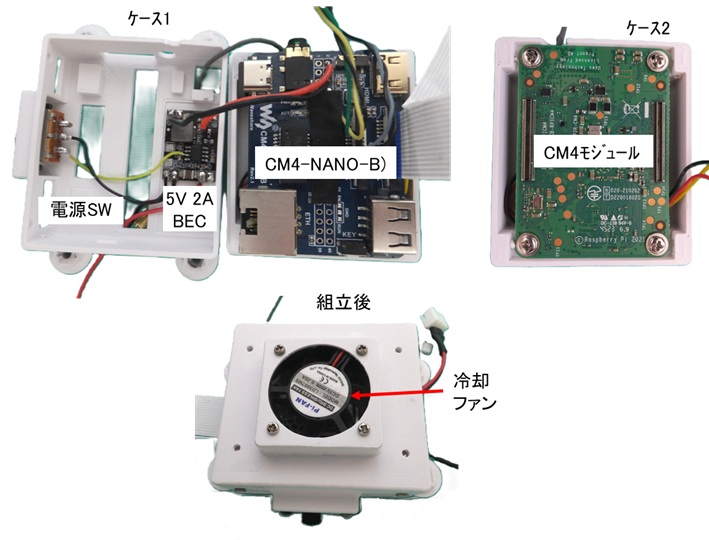
V3カメラ(AIカメラ)信号の処理はRaspberry-pi CM4モジュールを用いて行います。Raspberry-pi CM4モジュール単体では電源や外部信号の入力などはできないので、WaveshareのCM4-NANO-BベースボードにCM4モジュールを装着して使用します。このCM4モジュール搭載CM4-NANO-Bベースボード用のケースも3Dプリンターで作製します。以下にCM4モジュール用ケースの3Dプリントパーツを示します。
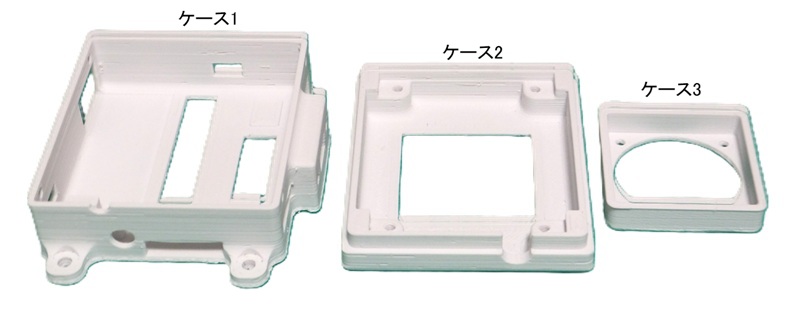
まずケース3をケース2に接着して冷却ファンを取り付けます。次にケース2にCM4モジュールを固定し、CM4-NANO-BボードをCM4モジュールと結合させ、ケース2,3をケース1にはめ込みます。以下のケース入りカメラモジュールの写真を示します。CM4モジュール、CM4-NANO-Bボード、その他の部品を含めたケース全体の重量は約65gでした。
以上、ジンバルカメラとCM4モジュール全体の重量は約185gとなります。CM4モジュール用の電源はドローンと別電源とし、2セル2200mAhのバッテリーを使用する予定です。このバッテリーの重さは約100gですので、ジンバルカメラ関連全体で約285gとなり予定した重量300gを下回ることができました。
今回は、ジンバルカメラおよびカメラ信号を処理するRaspberry-pi CM4モジュールを動作な能な状態に作り上げました。次回はSTorM32BCGツールを用いてジンバルコントローラへのFirmwareのインストール、パラメータ設定などを行います。