100g未満FPVドローン製作 – パラメータ設定(初期設定(3))
前回に引き続き、今回もArdupilotの「初期設定」について説明します。初期設定の項目は以下の通りです。
- ESC Calibration
- フェールセーフ
- Initial Tune Parameters
- モーターテスト
- VTXパラメータ
- その他のパラメータ
ESC Calibration
前回と同じようにXbeeテレメトリーを用いてMission Plannerとドローンを接続します。接続後、「初期設定」画面左側の「必須ハードウェア」・「ESC Calibration」タブ①をクリックします。「ESC Calibration」は以下の手順で実行します。
- 「ESC Type」コンボボックス②でESCプロトコルの形式を選択する。(フライトコントローラFlywoo GOKU GN405S AIOでは、「PWM]、「Oneshot125」、「Multishot」、「Dshot125」、「Dshot300」、「Dshit600」をサポートしている。)
- 「Calibrate ESCs」ボタン③をクリックしてバッテリーをドローンから取り外し、ドローンをパワーオフする。
- 再度、バッテリーを装着し、ドローンをパワーオンにする。
- 起動ビープ音とキャリブレーション完了のビープ音が聞こえたらドローンをパワーオフする。これで「ESC Calibration」は完了する。
- 完了のビープ音が聞こえなければ、パワーオフし、「ESC Type」を変更して1.~4.を繰り返す。
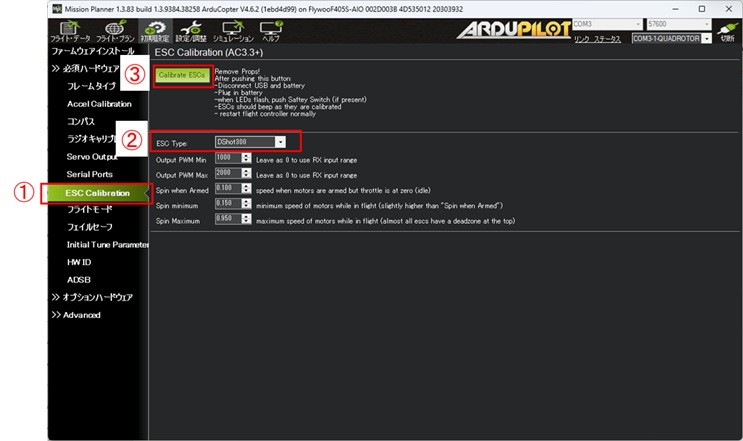
ESC Calibrationが終了し、再度ドローンを起動した際に4個のモータがランダムに回転する現象が見られたら、「ESC Type」の設定が適正でないと判断されます。「ESC Type」を変更して再度キャリブレーションを行います。
フェールセーフ
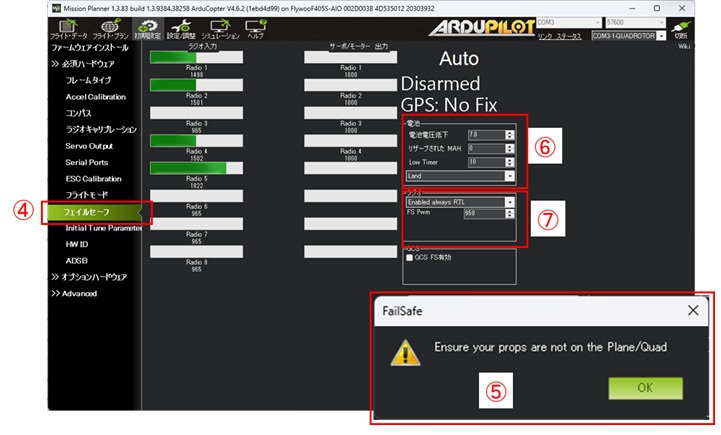
Ardupilotのフェールセーフにはいくつか項目がありますが、初期設定では、電源電圧が低下した場合の動作、RC送信機からの電波が途絶えた場合の動作を設定します。まず初期設定画面で「必須ハードウェア」・「フェールセーフ」タブ④をクリックします。「プロペラをドローンから外してください」のメッセージ⑤が表示されるので「OK」ボタンをクリックします。フェールセイフ画面の「電池」の項目⑥と「ラジオ」の項目⑦について設定を行います。「電池」の設定項目は以下の通りです。
- 「電池電圧降下」でフェールセーフが発動するバッテリー電圧を入力します。
- 「リザーブされたMAH」でフェールセーフが発動するバッテリー容量の残量値(%)を設定します。残量値を0に設定すると「リザーブされたMAH」ではフェールセーフは発動しません。
- 「Low Timer」にはフェールセーフ発動の猶予時間(秒)を設定します。
- コンボボックスで電圧が低下した場合のフライトモードを設定します。下の例では、「Land(着陸)」を設定しています。
フライトコントローラが示す電圧値はバッテリーの内部抵抗による電圧降下を含んでいますので、バッテリー容量に多少余裕があってもフェールセーフが発動され、飛行時間が短くなります。このため、「初期設定」では下記に述べる「initial tune parameter」による設定値のままとにし、実際にドローンを飛ばして電圧ドロップの値(起動時の電圧値と飛行中の電圧値の差分)をFPVで確認しながら調整し、飛行時間ができるだけ長くなるように設定します。2セッルバッテリでは6.9V以下に設定するとバッテリーの劣化を早めるので、7V以上に設定することを進めます。また、電圧パラメータ「BATT_CAT_VOLT」よりも高い値に設定する必要があります。
「ラジオ」の設定⑦では、「送信機」の信号が途絶えたときのフライトモードを設定します。下の例では「Enable Always RTL」(送信機の信号断で「Return To Launch」を発動する。)としています。「送信機」からの信号の強度はスロットルのPWM値で検出します。「FS Pwm」で最低のPWM値を設定し、これ以下になればフライトコントローラが「信号断」と判定してフェールセーフを起動します。
Initial Tune Parameters
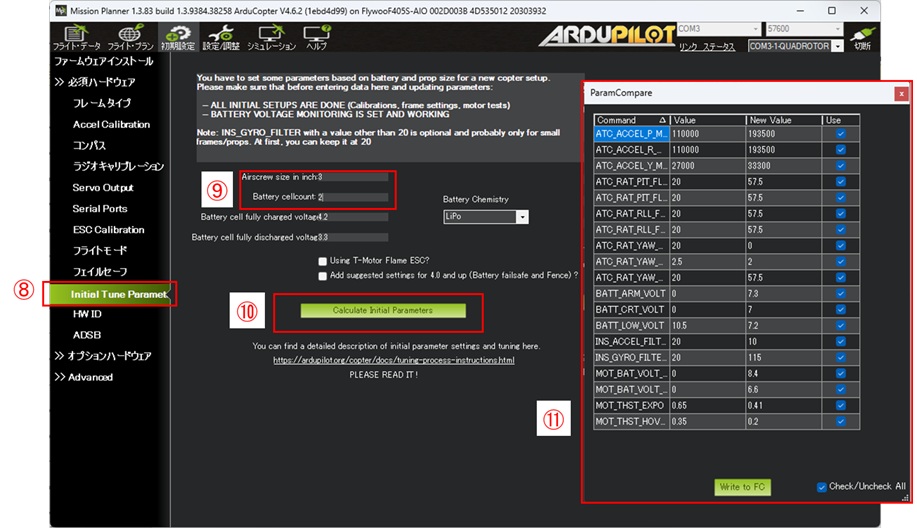
この項目は、プロペラサイズ、バッテリー電圧値より飛行に必要な最低限のチューニングパラメータを設定します。初期設定画面で「必須ハードウェア」・「Initial Tune Parameters」タブ⑧をクリックします。「Initial Tune Parameters」の画面で「Airscrew size in inch」と「Battery cellcount」の項目⑨でそれぞれプロペラーサイズ「3」インチ、バッテリーセル数「2」を設定します。「Calculate Initial Parameters」ボタンをクリックしてパラメータの算定を行います。終了後「ParamCompare」のメッセージボックス⑪が表示されます。「Write to FC」ボタンをクリックして、フライトコントローラに算定したパラメータを書き込みます。フェールセーフに関連するチューニングパラメータ「BATT_CRT_VOLT」、「BATT_LOW_VOLT」の現在値と算定値が表示されます。「BATT_LOW_VOLT」の値が上記のフェールセーフの「電池電圧降下」に設定されます。
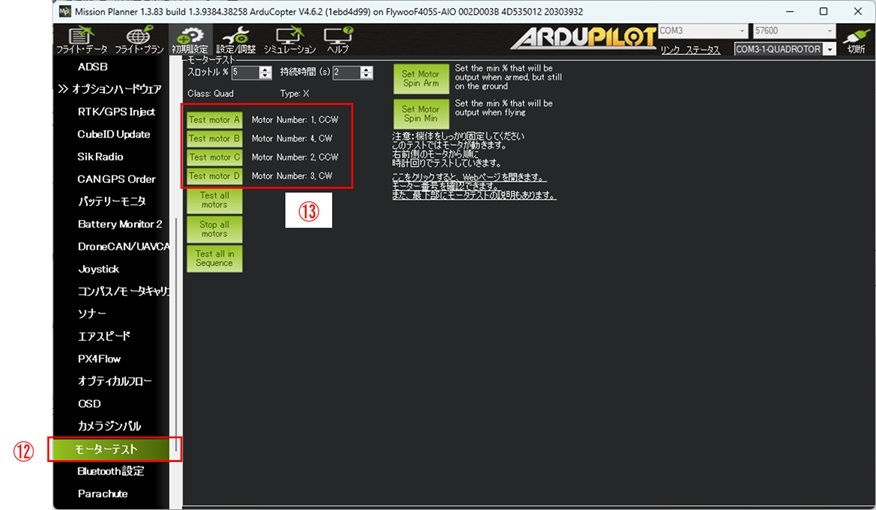
モーターテスト
ドローンはモーターが適正な位置に配置され、回転方向が適正な方向に設定されていないと正常に飛行できません。組み立てが完了したドローンにおいてモータが適切に配置されているかを「オプションハードウェア」・「モーターテスト」で確認します。4モータードローンでのモーター配置では必ず進行方向に対してAが右前、Bが右後、Cが左後、Dが左前になるよう配置します。Aの位置およびCの位置のモーター回転方向はCCW(反時計回り)、Bの位置およびDの位置のモーター回転方向はCW(時計回り)となります。
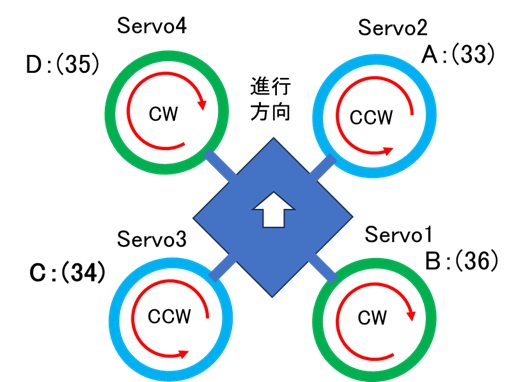
「初期設定」画面左の「オプションハードウェア」・「モーターテスト」タブをクリックして、「モーターテスト」の画面を表示させます。「Test motor A~B」ボタンをクリックして位置と回転方向が間違っていないか確認します。もし間違っていたら、「設定/調整」・「フルパラメータリスト」でServo1~4_function値について「33~36」を入れ替変えます。例えば、Servo1の位置にA、Servo2の位置にBがある場合、「Servo1_function」を36に、「Servo2_function」を33に設定し直します。
VTXパラメータ
VTXから5.8GHz帯の電波を発射するにはアマチュア無線4級以上の資格を取得し、総務省から無線局免許状を取得する必要があります。通常、無線局免許状の周波数帯にはアマチュア無線バンドの5.705GHzと5.800GHzの中央値5.750GHz(5750MHz)が記載されますが、日本のアマチュア無線資格で利用可能なVTXのバンドは以下の7バンドです(JARL アマチュアバンドプラン参照)。
| チャネル | 周波数 | VTX-Band | VTX-CH | FC-Band | FC-CH |
|---|---|---|---|---|---|
| CH31 | 5.705GHz | E | 1 | 2 | 0 |
| CH41 | 5.740GHz | F | 1 | 3 | 0 |
| CH17 | 5.745GHz | A | 7 | 0 | 6 |
| CH43 | 5.780Ghz | F | 3 | 3 | 2 |
| CH15 | 5.785Ghz | A | 5 | 0 | 4 |
| CH24 | 5.790GHz | b | 4 | 1 | 3 |
| CH44 | 5.800GHz | F | 4 | 3 | 3 |
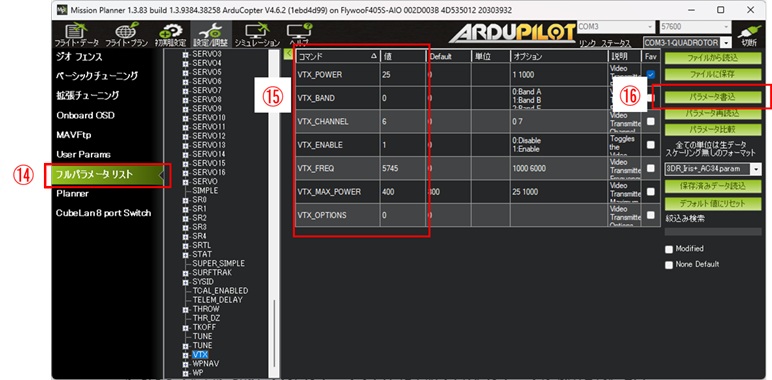
VTXの設定はMission Plannerの「設定/調整」・「フルパラメータリスト」画面で行います。「フルパラメータリスト」下方の「VTX_Enable」に1を設定して、ドローンを再起動します。再起動後、フルパラメータリストに下記のVTXパラメータ⑮が表示されるのでそれぞれ値を入力して設定します。設定後再起動すると、設定した5.8Ghz帯のFM方式の映像信号がVTXから発信されます。
- VTX_POWER:VTXの出力パワー設定(デフォルトは25mW、VTXによって設定方法がことなるので注意)
- VTX_BAND:上記表のFC-BAND値を設定(例えば5.745GHzでは、0を入力)
- VTX_CHANNEL:上記表のFC-CH値を設定(例えば5.745GHzでは、6を入力)
- VTX_FREQ:VTX_BANDおよびVTX_CHANNELを設定すれば自動で設定される。
- VTX_MAX_POWER:使用するVTXの最大出力を設定する。
- それぞれのパラメータに入力が終了後、「パラメータ書込」ボタン⑯をクリックしてフライトコントローラに書き込む。
VTXから発信される映像を見るには、5.8GHz映像受信機(USB出力タイプ、HDMI出力タイプ)+PCあるいはHDMIモニター、FPVレシーバモニタ、FPVゴーグル等が必要です。私はamazonで購入したRC-HDと呼ばれるHDMI出力の受信機と5インチのHDMIモニターをFUTABA T10J送信機に取り付けて、ドローンを操縦しながらHDMIモニターでドローンの状態や向きを確認しています。尚、FPVゴーグルを用いたドローンの操縦は目視外飛行に該当するので、私有地以外での飛行には二等無人操縦士資格以上が必要です。
その他のパラメータ
本ブログの100g未満ドローンでは、オプティカルフローとLidarを搭載しています。オプティカルフローは「100g未満ドローン製作 – パラメータ設定(初期設定(1))」で示したように「serial port」の設定(プロトコルはMSP)を行えば認識されます。Lidarを認識させるには追加で「フルパラメータリスト」の「Rangefinder1」の設定を行う必要があります。「設定/調整」画面右側の「フルパラメータリスト」をクリックして「パラメータリスト」を表示させ、下方にある「RNGFND1_TYPE」パラメータに「32:MSP」を設定してフライトコントローラに書き込み、ドローンを再起動します。「パラメータリスト」に「RANDFND1」の各パラメータが見えるようになります。「RANDFND1_MAX_CM」、「RANDFND1_MIN_CM」にそれぞれ測長可能な最大距離と最小距離を設定します。「RANGFND1_ORIENT」にLidarの方向を下方(25:down)に設定します。これでLiderによる地面からの測長距離はRangefinder1で取得できるようになります。
次に大事な設定は「RTL」のパラメータ設定です。100g未満ドーンに合った設定に変更する必要がります。「フルパラメータリスト」の「RTL」をクリックします。RTL発動時された後の機体の高度「RTL_ALT」を300~500(3m~5m)に設定します。あまり高くしすぎると上空の風により流されてしまう危険があります。次に「RTL」時のドローンのスピードを設定します。「RTL_SPEED」あるいは「WPNAV_SPEED」を300(3m/sec)程度に設定します。
その他、設定しておいた方がよいパラメータとしては「BATT_CAPACITY」でバッテリーの容量を設定します。100g未満ドローンのバッテリーは7.4V、550mAhですので「550」を設定します。FPVで残量が確認できます。
「初期設定」におけるパラメータの設定は以上です。次回からは、100g未満ドローンにおける飛行制御パラメタ(各軸PID制御パラメータ等)のチューニングに方法について説明します。いよいよ機体を地面から浮上させます。