100g未満FPVドローン製作 – パラメータ設定(初期設定(2))
今回は引き続きArdupilotパラメータの初期設定について説明します。今回から前回設定したXbeeテレメトリーを用いて無線でパラメータを設定します。初期設定の項目は以下の通りです。
- コンパス
- ラジオキャリブレーション
- フライトモード
- Servo Output
テレメトリーによるMission Planer との接続
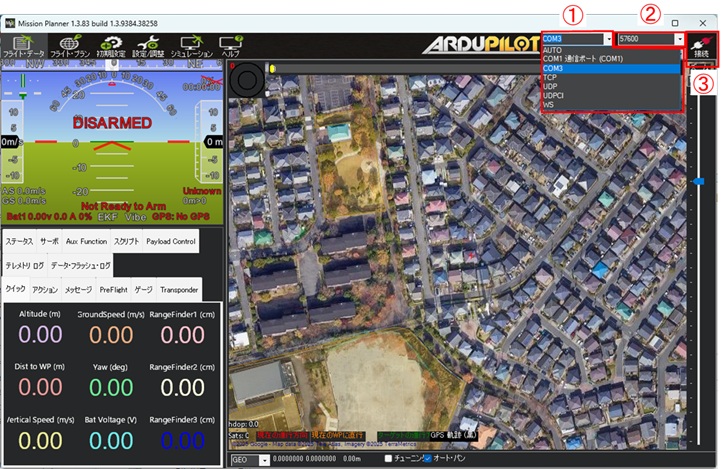
まず、地上局用XeeモジュールをPCにUSB接続してMission Plannerを起動します。100g未満ドローンにバッテリーを装着して起動します。Mission Planner 起動画面の右上のCOMポート選択欄①でXbeeモジュールが接続されたCOMポートを選択します。合わせてCOMポート横の「ボーレート設定」欄②を57600に設定します。「接続」ボタン③をクリックしてドローンを接続します。「接続中」→「パラメータ取得中1」のメッセージが表示され、取得が完了すると「接続」ボタンの表示が「切断」に変わり、接続が完了します。
コンパスの設定
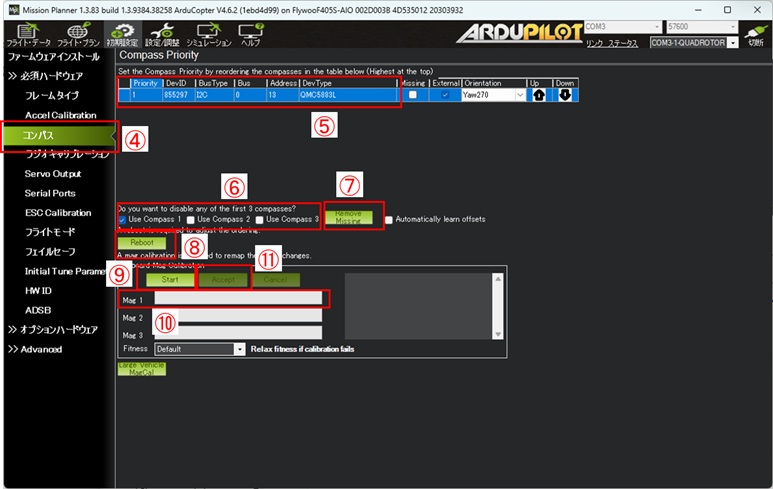
Mission Planer とドローンを接続したら「初期設定」タブ→「必須ハードウェア」タブ→「コンパス」タブ④それぞれを順にクリックし、コンパスキャリブレーション画面を表示させます。コンパスキャリブレーションの方法は以下の通りです。
- 「「コンパステーブル」欄⑤に検出されたコンパスがリストアップされているか確認する。コンパスがリストアップされていなければ、フライトコントローラはコンパスを認識できていないので、コンパス接続のI2C配線を確認する。
- ⑥のコンパスチェック欄に2以上チェックが入っていれば手動でコンパス2,3のチェックを外すか「Remove Missing」ボタン⑦をクリックして、「Reboot」ボタン⑧をクリックする。
- 一旦、ドローンからバッテリーを外し、再度バッテリーをつないで起動する。少し時間をおいてMission Plannerの「初期設定」タブ→「必須ハードウェア」タブ→「コンパス」タブそれぞれを順にクリックして⑥の「Use Compass1」のみにクリックがあるか確認する。
- 次に「Start」ボタン⑨をクリックしてキャリブレーションを開始する。
- 「Mag1」欄⑩が100%になるようにドローンを回転させる。(下方記載のドローン回転方法を参照)
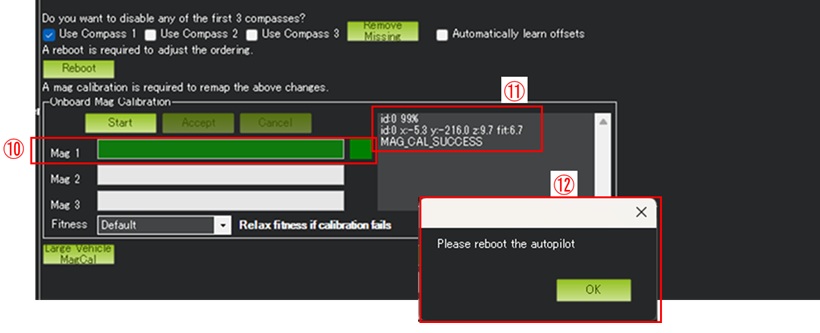
- 「Mag1」欄⑩のプログレスバーが緑色で埋め尽くされ、右横のテキスト欄⑪に「MAG_CAL_SUCCESS」が表示されてキャリブレーションが完了する。同時に「Please reboot the ardupilot」のメッセージボックス⑫が表示されるので「OK」ボタンをクリックする。
- 「Reboot」ボタン⑧をクリックしてキャリブレーションを終了する。
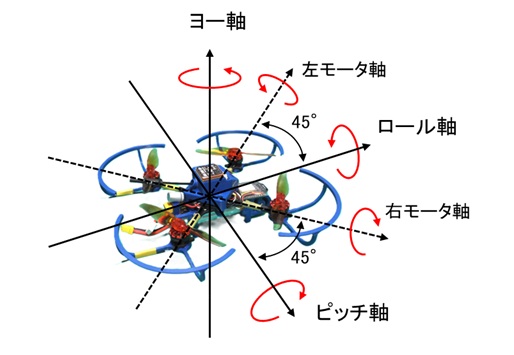
コンパスキャリブレーションでのドローンの回転方法
コンパスキャリブレーションでのドローンの回転方法の例を以下に示します。できるだけ多く軸を設定し、その軸を中心にもれなく回転させることがコンパスキャリブレーションの秘訣です。
- ヨー軸を中心に360°回転させる。
- ヨー軸をロール軸方向に90°傾け、ヨー軸を中心に360°回転させる。
- ヨー軸をピッチ軸方向に90°傾け、ヨー軸を中心に360°回転させる。
- ヨー軸を左モータ軸方向に90°傾け、ヨー軸を中心に360°回転させる。
- ヨー軸を右モータ軸方向に90°傾け、ヨー軸を中心に360°回転させる。
- ヨー軸を180°傾け(ドローンの背面を上にする)、ヨー軸を中心に360°回転させる。
- ロール軸を中心に360°回転させる。
- ピッチ軸を中心に360°回転させる。
- 右モータ軸を中心に360°回転させる。
- 左モータ軸を中心に360°回転させる。
ラジオキャリブレーション
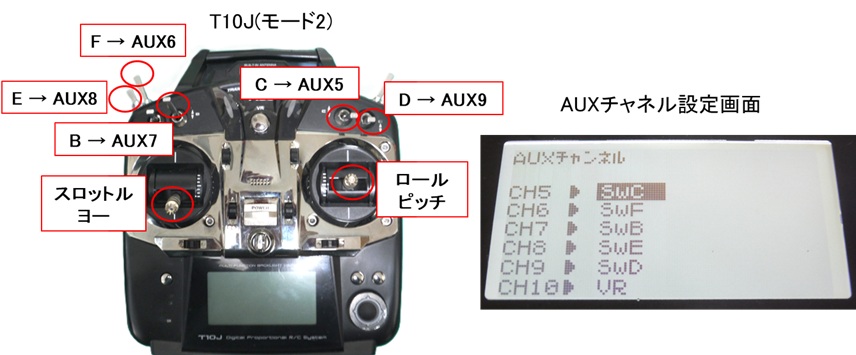
ラジオキャリブレーションを行う前にRC送信機のAuxチャネルの設定が必要です。今回RC送信機はFUTABA T10Jを用います。Auxチャネルの各操作モードについて以下のようにRC送信機スイッチを割り当てました。ドローンに搭載した受信機FUTABA R2000SBMでは受信チャネルは8チャネルです。従ってAuxチャネル8まで受信ができます。Auxチャネル9はドローンで受信できませんがRCスイッチDに設定し、Cスイッチとのプログラムミキシングに設定してAuxチャネル5の6値PWM値生成に使用しました。T10JのAuxチャネル設定についてはT10J操作マニュアルを参照してください。
| Aux チャネル | 操作モード | RC スイッチ |
|---|---|---|
| Aux5 | フライトモードの設定(Audupilot固定) | C |
| Aux6 | RTL(Return To Launch:リターンホームと同じ) | F |
| Aux7 | Flow Calibration(オプティカルフローのキャリブレーション) | B |
| Aux8 | GPSとオプティカルフローの切り替え | E |
| Aux9 | Cスイッチとミキシング。ドローンからは見えない。 | D |
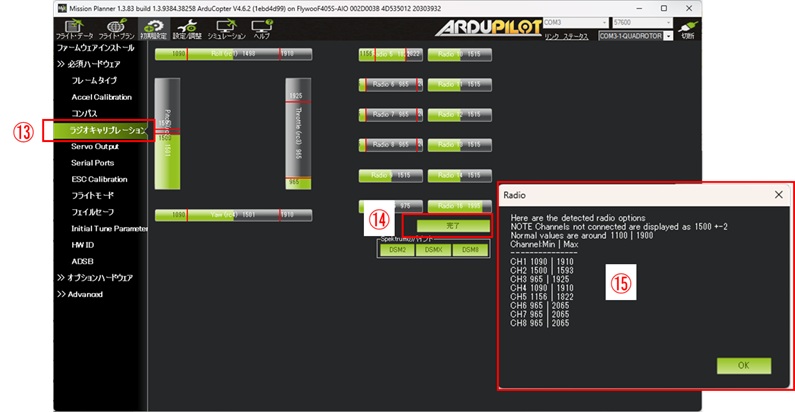
ラジオキャリブレーションはMission Planner「初期設定」画面で「必須ハードウェア」・「ラジオキャリブレーション」⑬をクリックしてキャリブレーション画面を表記させます。RC送信機の電源ONにしてドローンとリンクさせ、画面右下の「ラジオキャリブレーション」ボタン⑭をクリックします。クリックすると「ラジオキャリブレーション」表示が「完了」に変わり、キャリブレーションを開始します。RC送信機の各スティックを最大最小に動かし、Auxチャネルに設定した各スイッチをLOW/HIGHにし、画面の縦・横のバーに最小、最大の値の赤線が表示されることを確認します。全てのスティック、スイッチで赤線が表示されたら「完了」⑭ボタンをクリックします。「Radio」メッセージボックス⑮が表示されCH1~8までの最小値、最大値が表示されます。「OK」ボタンを押して終了します。
フライトモード設定
Ardupilotでは基本飛行モード(Stabilize、Alt hold、Loiter、(Acro)等)の設定、切り替えをAuxチャネル5で行います。Mission Plannerの「初期設定」画面の「必須ハードウェア」・「フライトモード」⑯をクリックして「フライトモード」設定画面を表示させます。画面中央の「Flightモード1~6」についてコンボボックス⑰から各フライトモードを選択・設定します。設定が完了したら、「モードの保存」⑱ボタンをクリックして設定を保存します。以下の図に、フライトモードを「Land」、「Althold」、「Loiter」、「Auto」の4モードに設定した例を示します。通常の設定では、「Stabilize」、「Althold」、「Loiter」を用いますが、オプティカルフローの関係でスイッチが足らなくなるので、ほとんど使わない「Stabilize」の代わりに「LAND(着陸)」をフライトモードで設定しました。Ardupilotの飛行モードについては以下のサイトを参照してください
Flight Modes — Copter documentation
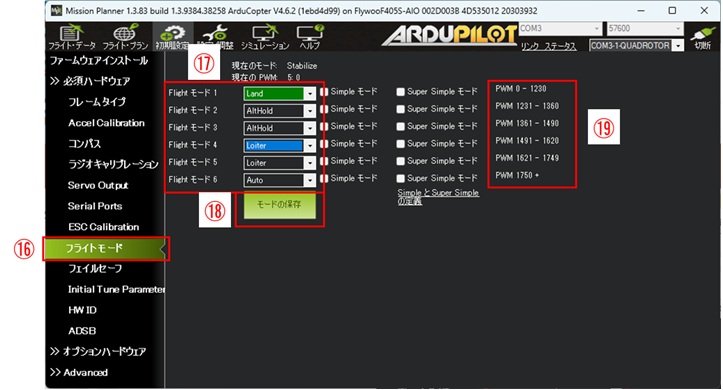
ここで注意しなければならないのは、ArdupilotではフライトモードをAuxチャネル5のPWM値⑲で切り替えていることです。フライトモード1~6のPWM値の範囲は以下のようになっています。
| モード番号 | PWM最小値 | PWM最大値 |
|---|---|---|
| モード1 | 0 | 1230 |
| モード2 | 1231 | 1360 |
| モード3 | 1361 | 1490 |
| モード4 | 1491 | 1620 |
| モード5 | 1621 | 1749 |
| モード6 | >1750 |
通常のRC送信機のAuxチャネルはボリュームチャネルを除き、「LOW(OFF)/HIGH(ON)」、「LOW/MIDDLE/HIGH」のどちらかのスイッチに設定します。したがってAuxチャネル5に「LOW/MIDDLE/HIGH」スイッチを設定しても単体では最大でも3モードしか設定できません。3モード以上設定できるようにするには、RC送信機のプログラミングミキシング機能を用います。「LOW/MIDDLE/HIGH」3モードスイッチと「OFF/ON」2モードスイッチを用いてAuxチャネル5のPWM値を6値生成できるようにします。
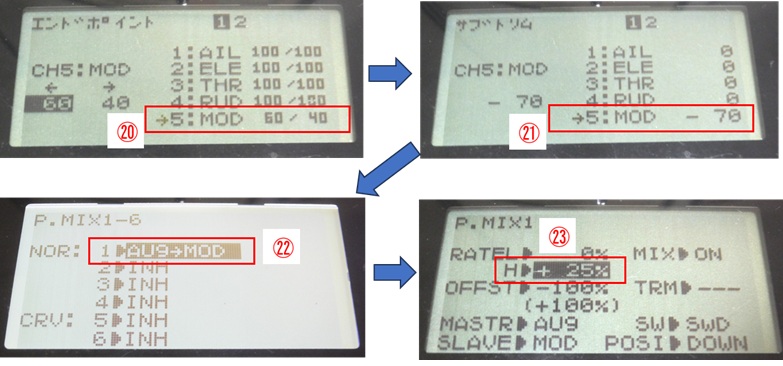
RC送信機(T10J)におけるAuxチャネル5の6値PWM値の設定
T10Jを用いたAuxチャネル5の6値PWM値の設定方法は以下の通りです。
- Auxチャネル5についてエンドポイント(最小100→60、最大100→40)を変更する。
- サブトリム機能を用いてAuxチャネル5の中央値をLow側(0→-70)にずらす。
- プログラミングミキシング機能を用いてAuxチャネル9をONにした場合のAuxチャネル5PWMの+値(+25%)を設定する。
- 各モードのPWMの範囲を参照しながらカットアンドトライで1.~3.の値を変更し、フライトモード1~6のPWM範囲内に入るようにする。
Servo Output
Servo Outputとはフライトコントローラに接続したPWM機器(サーボモータ、LED)のServoチャネルを設定することを示します。100g未満ドローンでは外付けのPWM機器はモータだけでデフォルトで設定してあり、Mission Plannerで新たに設定することはありません。

今回は、前回設定したテレメトリーを用いて「初期設定」のコンパスキャリブレーション、ラジオキャリブレーション、フライトモードの設定、RC送信機のAuxチャネルの設定の説明を行いました。次回も引き続き「初期設定」の残りの項目について説明する予定です。