100g未満FPVドローンの製作 – 組み立て
今回は前回までに選定したパーツおよび成形した3Dプリントパーツを用いてドローンを組み立て、重量が100g未満かを確認します。
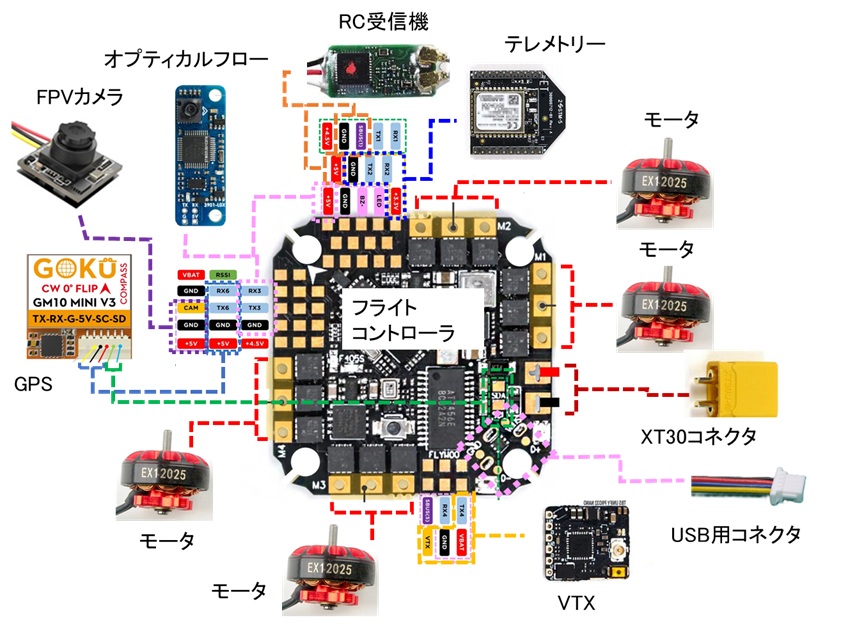
フライトコントローラと各パーツの接続
カメラ出力やVTX入力については、それぞれフライトコントローラの映像入力および映像出力の端子に接続します。センサーパーツおよびVTXの制御端子についてはUART端子およびI2C端子を用いて接続します。以下の表に本ドローンにおけるUART端子およびI2C端子とセンサーパーツとの接続割り当てを示します。
| No | I/O端子名 | センサー名 | プロトコル |
|---|---|---|---|
| 1 | UART1(Rx1、SBUS) | RC受信機 | S.BUS |
| 2 | UART2(Rx2,Tx2) | テレメトリー(Xbee Zigbee) | MAVLINK2 |
| 3 | UART3(RX3,TX3) | オプティカルフロー | MSP |
| 4 | UART4(Tx4) | VTXコントロール | SmartAudio |
| 5 | UART6(Rx6,Tx6) | GPS | u-blox |
| 6 | I2C (SDA,SCL) | コンパス | – |
UART1はRx1(SBUS端子と共有)のみ使用し、Tx1端子は未使用です。また、VTX制御用のUART4はTx4のみを使用しRX4端子は未使用です。各UART端子の通信プロトコル(通信手順)は上記の表のように接続するセンサーにより決まっています。Ardupilotでは各UARTにプロトコルを設定する欄があり、接続するセンサーに該当するプロトコル番号をその欄に設定することになります。以下の図にフライトコントローラと各パーツの接続図を示します。尚、テレメトリー(Xbeeモジュール)の接続は、必ずXbeeにパラメータを設定した後に行ってください。Xbeeのパラメータ設定方法については後日「100g未満ドローンのパラメータ設定」で説明します。
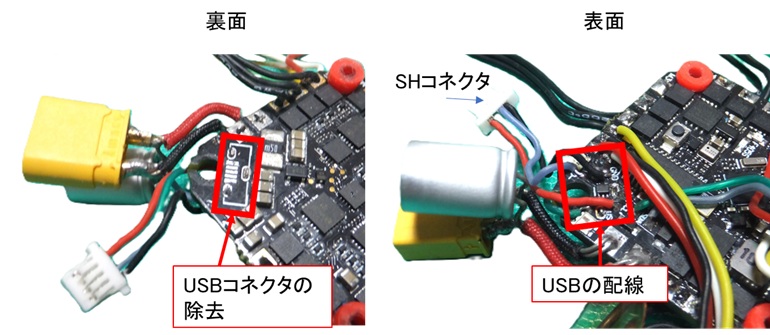
フライトコントローラのUSBコネクタは下向きに配置されていています。この向きではバッテリーの実装が困難なのでUSBコネクタを取り除くことにします。USBコネクタの取り外しにはサンハヤト社の表面部品取り外しキットを用います。フライトコントローラに小さなUSB信号パッドが配置されているので、コネクタの代わりにそのパットにJST製SHコネクタを接続します。PCとフライトコントローラの接続には市販のSHコネクタメスとタイプ3USBコネクタを実装した変換ボードを用い、変換ボードとPC間をUSBケーブルで接続します。
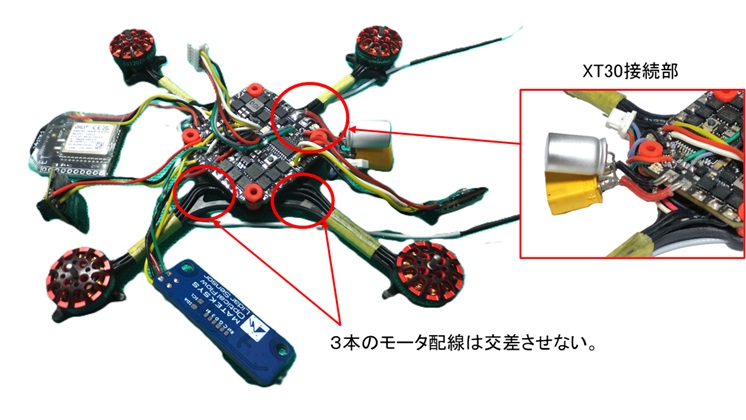
バッテリーとフライトコントローラの接続にXT30コネクタを使用します。フライトコントローラのバッテリー端子は進行方向から45度傾いた方向にパッドが配置されているので、下記の結線写真のように絶縁チューブに通した2本の錫メッキ線を曲げてXT30バッテリーコネクタに接続しています。また、XT30コネクタにはノイズ低減のため470μF25Vの電解コンデンサを接続しています。
モータとフライトコントローラの接続配線はフレームの腕部分に沿って配線を這わせています。モータはブラシレスモータなので3本の電線でフライトコントローラに接続します。3本の電線が交差しないようにフライトコントローラのM1、M2、M3、M4と記載された部分の3ヵ所のパッドにモーターの電線3本をハンダ付けします。
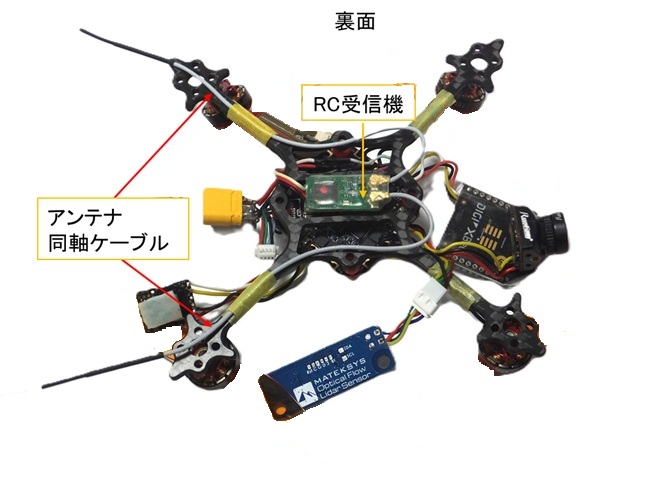
RC受信機は下記の裏面結線写真のようにフレーム中央スペースに配置し、バッテリーホルダーと両面テープで固定します。また、RC受信機のアンテナ同軸ケーブルは2本のフレーム後側腕部分に沿って這わしています。2本のアンテナの配置はフタバの推奨に従いできるだけ角度が90度になるようにして配置しています。
この結線した状態のものに3Dプリントパーツ(バッテリーホルダー、FCカバー、プロペラガード)をネジで取り付け、テレメトリーのXbeeモジュールをカメラの上のバッテリーホルダーに両面テープを使って固定してドローンが完成します。取り付け手順は以下の通りです。フライトコントローラソフトのパラメータ設定が終了して実際に飛行を開始するまでは、安全のためプロペラを装着しないでください。
- XT30コネクタをバッテリーホルダーのXT30保持用の通し穴に通す。
- フレームおよびフライトコントロールの固定穴とバッテリーホルダーの固定ネジ穴部を位置合わせする。
- 外側よりVTXアンテナをFCカバーのアンテナ保持穴に通す。
- FCカバー内側でVTXのU.FLコネクタとVTXアンテナを嵌合させる。
- VTXをFCカバーに両面テープで取り付ける。
- FCカバーの内側より外側にGPS用のコネクタを通してGPSと接続すし、GPSを厚みのある両面テープで固定する。
- ネジ径2mm、長さ15mmのネジをFCカバーネジ穴に通し、FCカバー、フレーム、バッテリーホルダーを固定する。
- ネジ径2mm、長さ6mmのネジでプロペラガード、フレーム、モータを固定する。
- テスト飛行開始直前にプロペラをモータの軸に押し込む。
以上の組み立て手順により以下の写真のドローンが完成します。

完成したドローンの重量 - 100g未満を達成!
完成したドローンの重量は以下のようになります。550mAhのバッテリーを搭載しても室外用プロペラガード込みで何とか100g未満を達成することができました。
| プロペラガード | バッテリー | ドローン重量(g) |
|---|---|---|
| 屋外用 | 450mAh | 96.5 |
| 屋外用 | 550mAh | 99.5 |
| 屋内用 | 450mAh | 101.8 |
| 屋内用 | 550mAh | 104.7 |
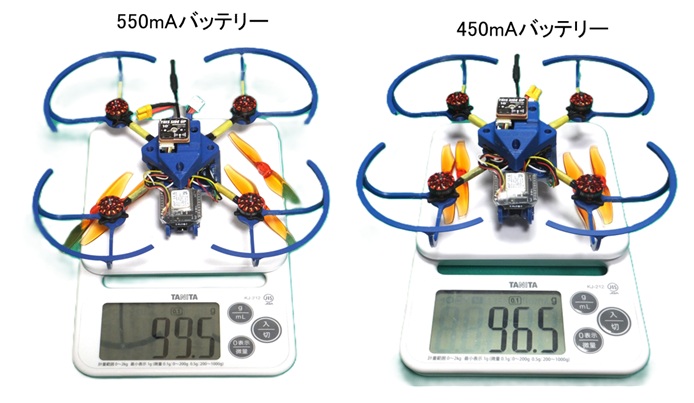
尚、バッテリーには重量バラツキがあります。私の保有する数本の550mAhバッテリーの重量は28.8g~29.4gでした。ドローンの重量はそれぞれ99.1g~99.7gで、すべて100g未満を達成しています。屋外で飛行させるときは、バッテリーを装着した状態でドローンの重量を確認する必要があります。尚、屋外飛行を行う時にオプティカルフローセンサ(主に室内でのホバリング等に必要)を取り外せば2g程度のマージンを増やすことができます。
次回から完成したドローンにインストールするフライトコントローラソフトArdupilot(Firmware)のカスタマイズの方法やインストールの方法について説明していきます。